前言
第1章 绪论
1.1 柔顺机构的优越性
1.2 柔顺机构的挑战
1.3 历史背景
1.4 柔顺机构与大自然
1.5 术语和图表
1.5.1 柔顺机构与柔顺结构
1.5.2 术语
1.5.3 图表
1.6 柔顺MEMS
习题
第2章 柔性与变形
2.1 线性与非线性变形
2.2 刚度和强度
2.3 柔性
2.4 位移与力载荷
2.5 材料方面的考虑
2.5.1 柔性梁的最大变形
2.5.2 强度与杨氏模量之比
2.5.3 材料选择的其他准则
2.5.4 蠕变和应力松弛
2.6 线性弹性变形
2.7 能量储存
2.8 应力刚化
2.9 大变形分析
2.9.1 末端受力矩载荷的梁
2.9.2 椭圆积分解法
2.9.3 数值方法
习题
第3章 失效预防
3.1 应力
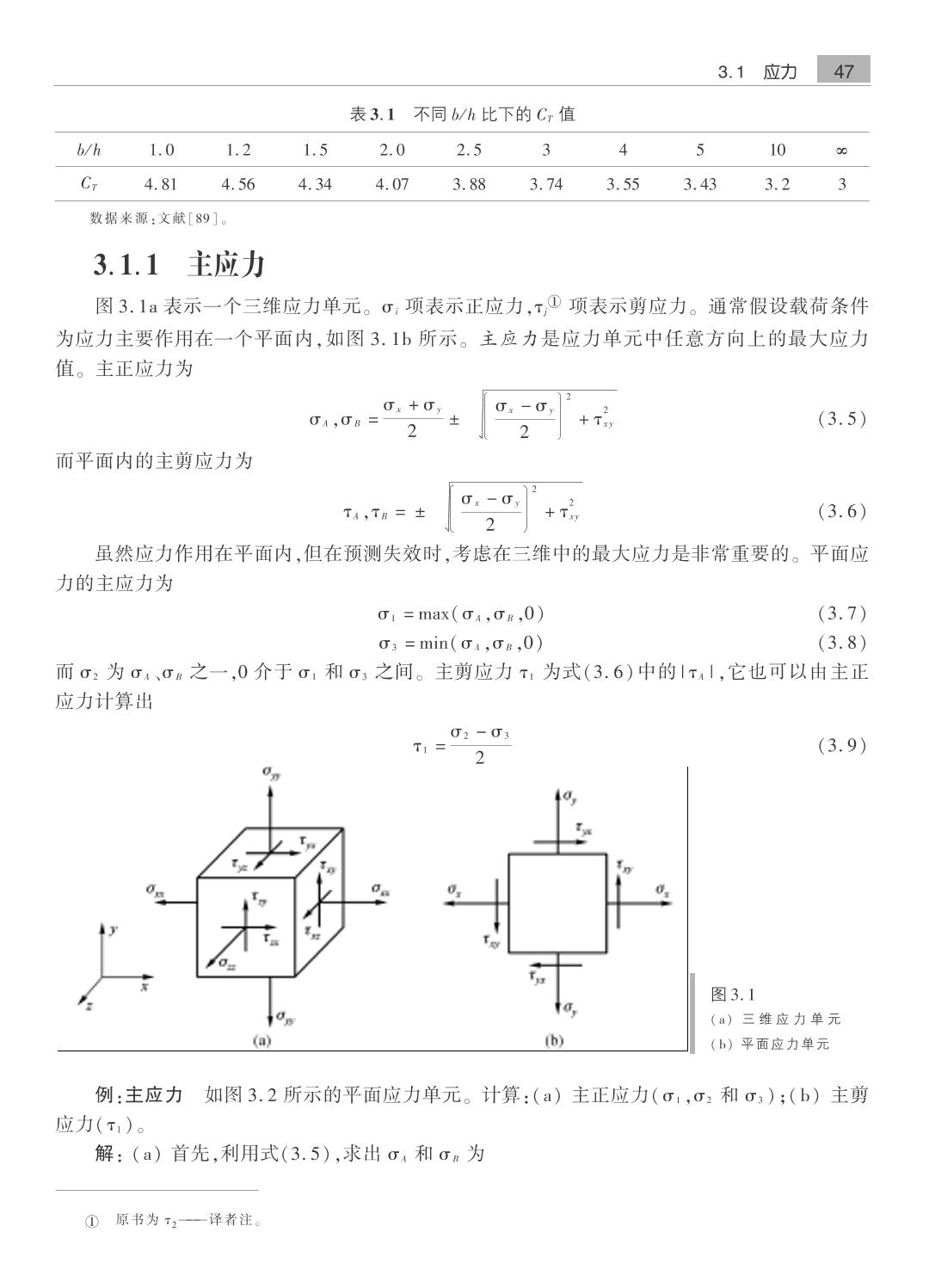
3.1.1 主应力
3.1.2 应力集中
3.2 静态失效
3.2.1 延性材料
3.2.2 脆性材料
3.3 疲劳失效
3.3.1 疲劳基础
3.3.2 疲劳失效预测
3.3.3 疲劳极限和疲劳强度估计
3.3.4 疲劳极限和疲劳强度修正系数
3.3.5 表面系数
3.3.6 尺寸系数
3.3.7 载荷系数
3.3.8 可靠性
3.3.9 综合影响
3.3.10 完全反向载荷
3.3.11 脉动应力
3.3.12 聚合材料的疲劳
3.3.13 试验
习题
第4章 刚性构件机构
4.1 引言
4.1.1 活动度
4.1.2 运动链及转化
4.1.3 四杆机构的分类
4.1.4 机械增益
4.2 位置分析
4.2.1 四杆机构:封闭形方程
4.2.2 曲柄滑块机构:封闭形方程
4.2.3 复数法
4.3 速度和加速度
4.4 运动系数
4.4.1 四杆机构的运动系数
4.4.2 曲柄滑块机构的运动系数
4.5 机构综合
4.5.1 函数生成
4.5.2 轨迹生成
4.5.3 运动生成
习题
第5章 伪刚体模型
5.1 短臂柔铰
5.1.1 主动力与被动力
5.1.2 应力
5.1.3 活动铰链
5.2 自由端受力的悬臂(固定-铰接)梁
5.2.1 梁变形轨迹的参数化近似法
5.2.2 特征半径系数
5.2.3 梁末端坐标
5.2.4 特征半径系数的经验算法
5.2.5 角变形近似
5.2.6 刚度系数
5.2.7 扭簧常数
5.2.8 应力
5.2.9 固定-铰接片段的实际应用
5.3 固定-导向柔性片段
5.4 末端受力矩载荷
5.5 初始弯曲悬臂梁
5.5.1 初始弯曲梁的刚度系数
5.5.2 初始弯曲梁的应力
5.6 铰接-铰接片段
5.7 受力和力矩载荷的(固定-固定)片段
5.8 模拟铰链的其他方法
5.8.1 活动铰链
5.8.2 被动铰链
5.8.3 Q铰
5.8.4 交错轴柔铰
5.8.5 扭转铰链
5.8.6 开口管道柔铰
5.9 机构建模
5.10 机构分析商业软件的应用
习题
第6章 力与变形的关系
6.1 自由体图解法
6.2 广义坐标
6.3 功与能
6.4 虚位移与虚功
6.5 虚功原理
6.6 虚功原理的应用
6.7 固定-铰接构件的弹簧函数
6.8 伪刚体四杆机构
6.9 伪刚体滑块机构
6.10 多自由度机构
6.11 结论
习题
第7章 数值方法
7.1 有限元分析
7.2 链式算法
第8章 柔顺机构综合
8.1 转换刚体(运动)综合
8.2 柔顺综合:运动静力综合
8.2.1 附加方程和未知量
8.2.2 方程的耦合
8.2.3 设计约束
8.2.4 θ0=θj的特殊情况
8.3 其他综合方法
8.3.1 有限位移的Burmester理论
8.3.2 无限位移
8.3.3 伪刚体模型的优化
8.3.4 最优化方法
习题
第9章 连续模型的优化综合
9.1 引言
9.1.1 分布柔顺
9.1.2 连续模型
9.1.3 用有限元法进行弹性静力分析
9.1.4 结构优化
9.2 优化问题方程式
9.2.1 目标函数、约束条件和设计变量
9.2.2 刚性和柔性的度量
9.2.3 多准则方程式
9.3 尺度、形状及拓扑优化
9.3.1 尺度优化
9.3.2 形状优化
9.3.3 拓扑优化
9.4 计算方面
9.4.1 优化算法
9.4.2 灵敏度分析
9.5 最佳准则法
9.5.1 最佳准则的导出
9.5.2 求解过程
9.5.3 例题
9.6 结论
9.7 致谢
习题
第10章 特殊用途机构
10.1 柔顺常力机构
10.1.1 柔顺滑块机构的伪刚体模型
10.1.2 尺度综合
10.1.3 确定力的大小
10.1.4 举例
10.1.5 柔性铰链中应力的估算
10.1.6 举例
10.2 平行机构
10.2.1 柔顺平行导向机构
10.2.2 应用
10.2.3 伪刚体模型
10.2.4 其他设计因素
习题
第11章 双稳态机构
11.1 稳定性
11.2 柔顺双稳态机构
11.3 四杆机构
11.3.1 能量方程
11.3.2 双稳态性能要求
11.3.3 杨氏双稳态机构
11.4 曲柄滑块或摇杆滑块机构
11.4.1 能量方程
11.4.2 双稳态性能要求
11.4.3 各种弹簧位置举例
11.5 双滑块机构
11.5.1 用铰链连接滑块的双滑块机构
11.5.2 用连杆连接滑块的双滑块机构
11.5.3 双稳态性能要求
11.6 弹簧波纹梁
11.7 双稳态凸轮机构
习题
附录A 参考文献
附录B 截面特性
B.1 矩形
B.2 圆
B.3 空心圆
B.4 实心半圆
B.5 直角三角形
B.6 等厚凸缘工字梁
附录C 材料特性
附录D 线弹性梁变形
D.1 自由端受力的悬臂梁
D.2 沿长度方向受力的悬臂梁
D.3 受均布载荷的悬臂梁
D.4 自由端受力矩作用的悬臂梁
D.5 中点受力的简支梁
D.6 沿长度方向受力的简支梁
D.7 受均布载荷的简支梁
D.8 一端固定另一端简支的梁
D.9 中点受载荷的两端固定梁
D.10 受均布载荷的两端固定梁
D.11 一端固定另一端导向的梁
附录E 伪刚体模型
E.1 短臂柔铰
E.2 自由端受垂直力作用的悬臂梁
E.3 自由端受力的悬臂梁
E.4 固定-导向梁
E.5 自由端受力矩作用的悬臂梁
E.6 初始弯曲悬臂梁
E.7 铰接-铰接片段
E.8 力-力矩复合的末端载荷
附录F 椭圆积分计算
附录G 柔顺机构的型综合
G.1 刚性构件机构的矩阵表达式
G.2 柔顺机构矩阵
G.2.1 片段类型规定
G.2.2 连接类型规定
G.2.3 例子
G.3 同构机构的判定
G.3.1 刚体机构同构的检测方法
G.3.2 柔顺机构的同构检测
G.4 型综合
G.5 设计要求的确定
G.6 柔顺机构的拓扑综合
G.6.1 片段类型枚举
G.6.2 连接类型枚举
G.6.3 片段和连接类型的组合结果
G.6.4 柔顺机构的构成
G.7 举例
中英文名词对照